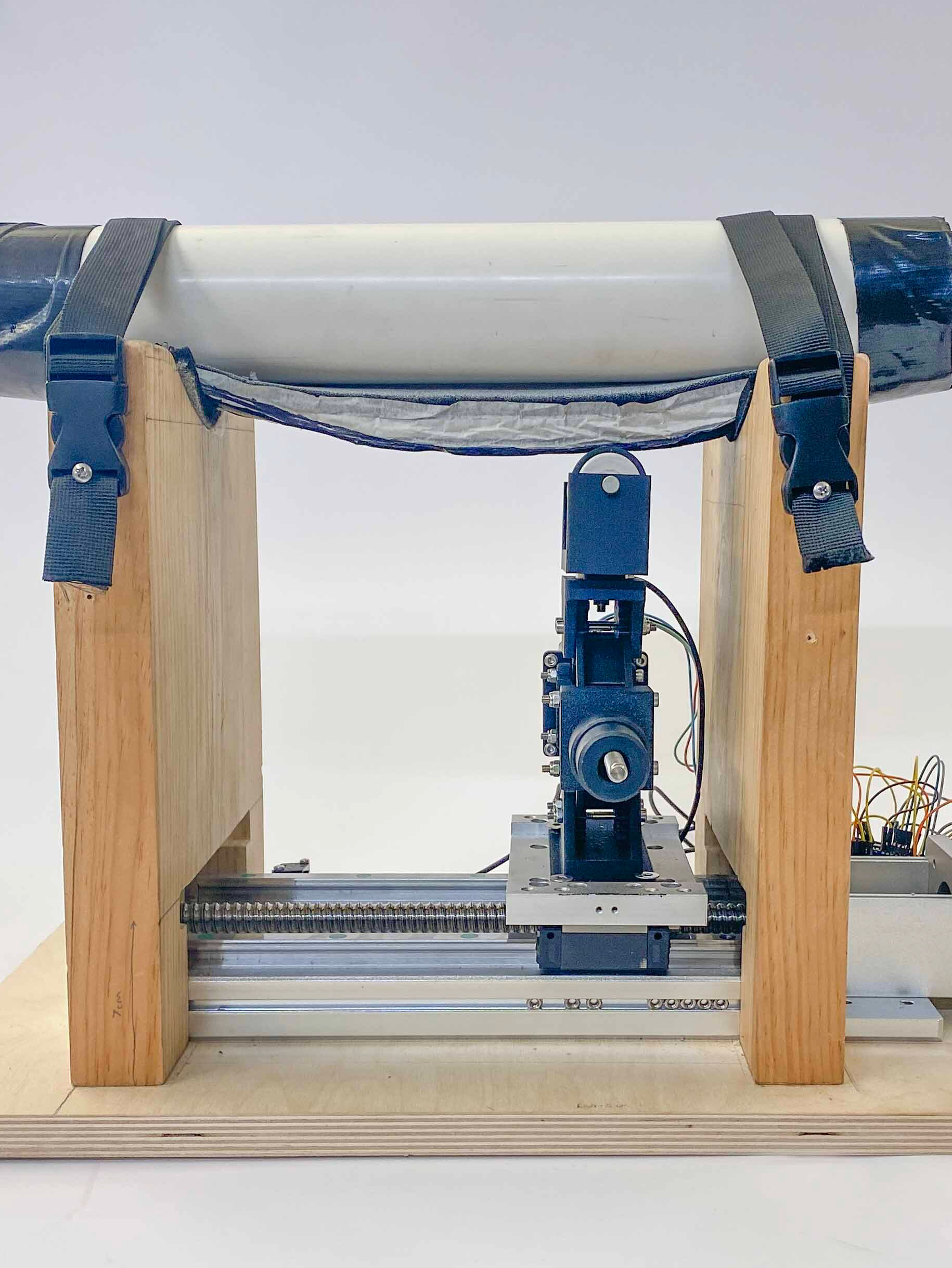
Over my senior fall I took 2.74: Bio-Inspired Robotics. The class teaches biomechanics, numerical methods, and robotics techniques through lectures, readings, and labs. The class culminates in a robotics project completed over the second half of the term—my group investigated the effects of Achilles tendon stiffness on vertical hopping. We designed and fabricated the robot, simulated and optimized its dynamics in MATLAB, controlled its trajectory to generate a hop, and presented our work to the rest of the class at the end of the semester.
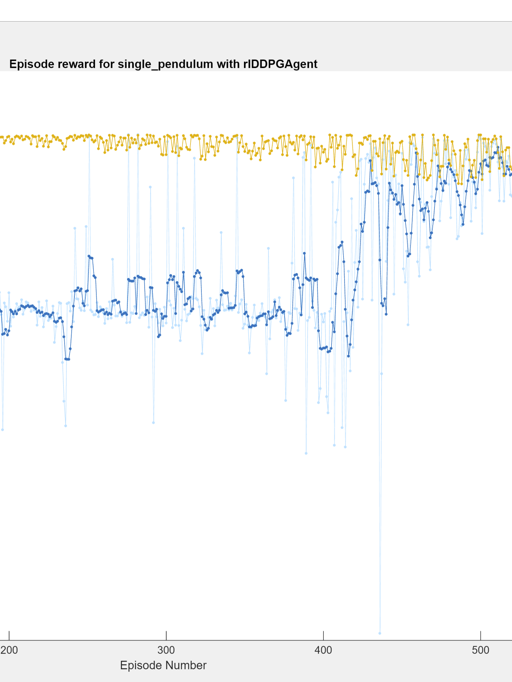
We simulated the dynamics of the robot in MATLAB, and performed a parameter sweep to optimize the trajectory of the robot and stiffness of the "Achilles tendon" (represented by a spring in simulation and rubber bands on hardware) for a maximum height vertical hop.
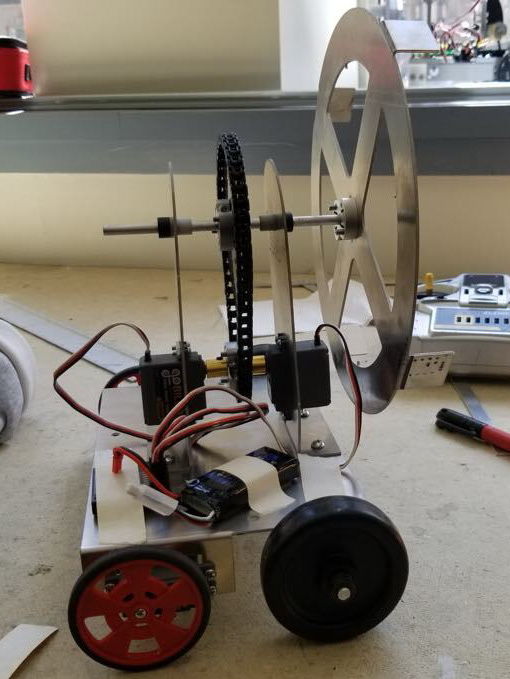
We were able to produce a small hop with our physical robot. Unfortunately, our Nucleo board broke towards the end of the project, and we were unable to get a replacement before we could apply the most useful results from our simulation.
We also simulated horizontal hopping towards the end of the project, which could be an avenue of future research.