I took 2.12: Introduction to Robotics over the spring of 2025. The class covered a wide range of topics in robotics, including kinematics, dynamics and controls, and machine learning. The class also had a laboratory component that prepared us for the final project, in which teams used a UR5 robotic arm to pick water bottles of different colors from a conveyor belt and throw the bottles into bins of the corresponding color.
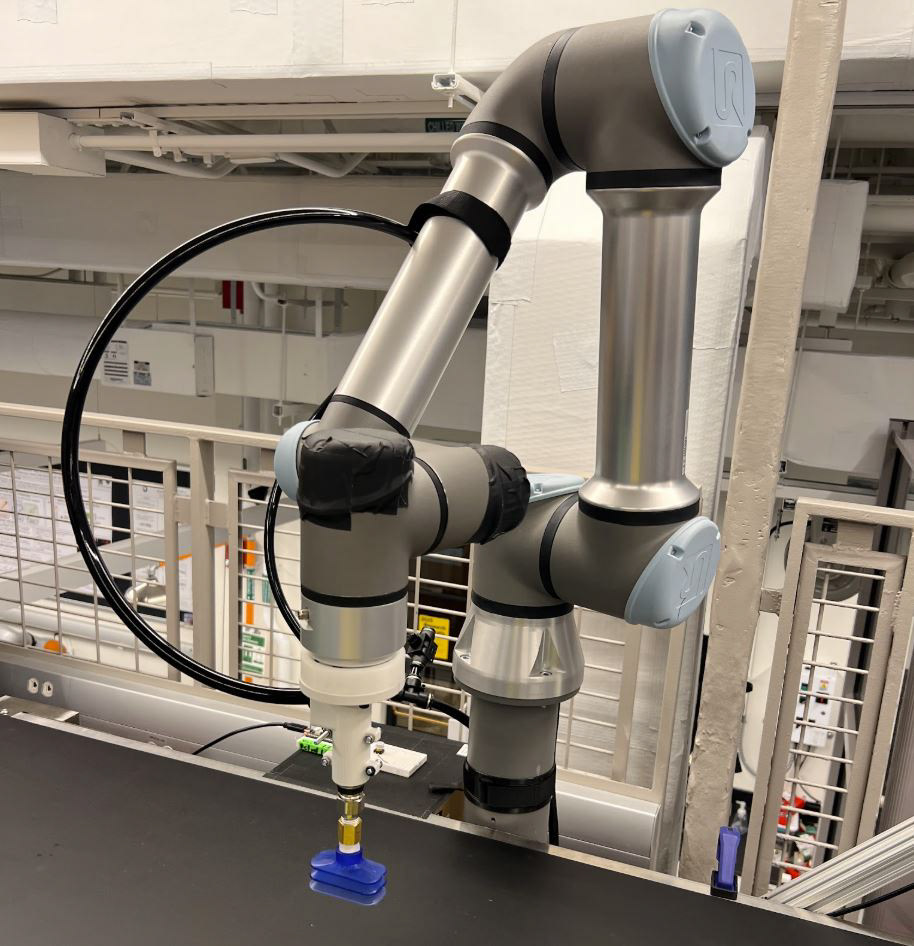
The final concept our team implemented utilized a vacuum pump and suction cup attached to the UR5.
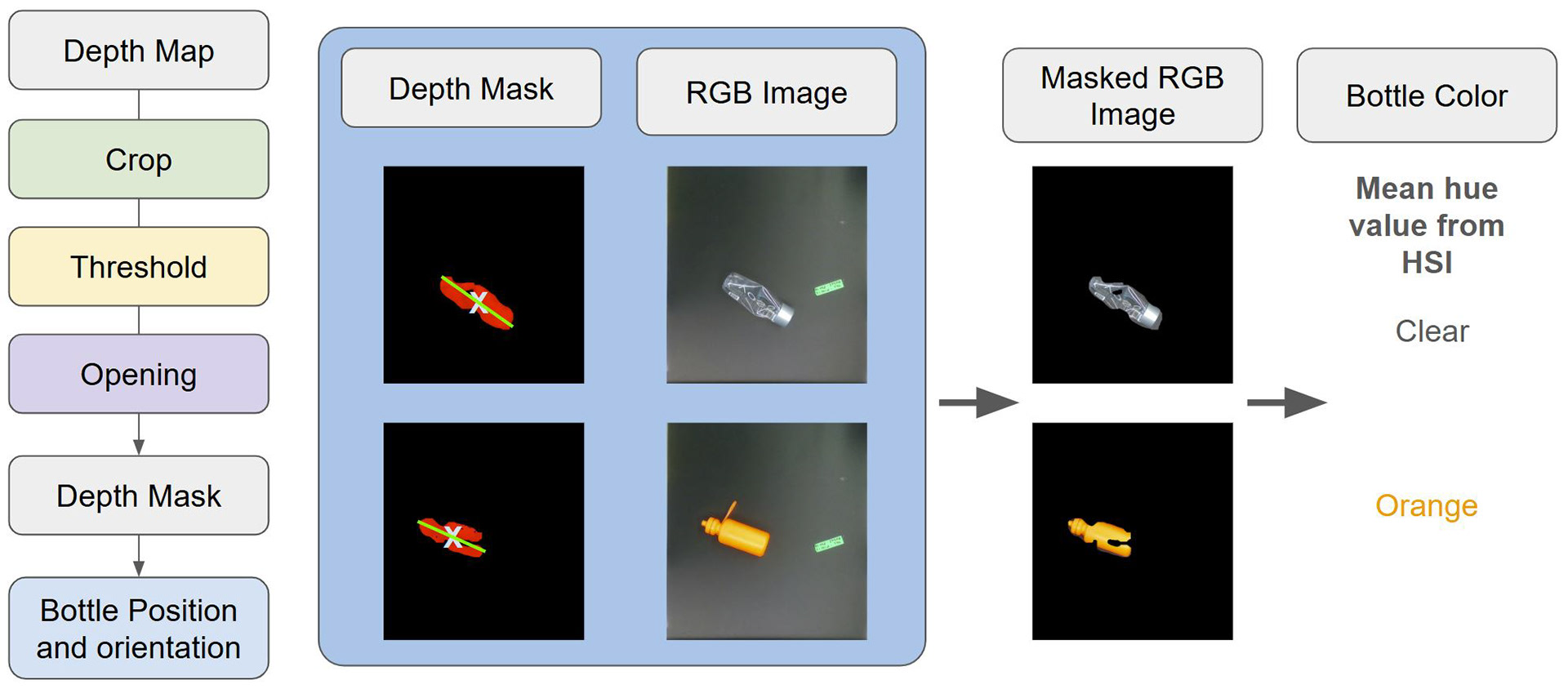
One of my contributions was towards classifying the bottle color. We used an an Intel RealSense camera and pyrealsense to extract a depth map and color map, then averaged the RGB values for all pixels of a certain depth and converted the RGB value to HSI to generate a color prediction.
We were able to consistently classify the bottle colors with 100% accuracy, and successfully pick and throw most of the bottles.