Over the fall of 2022 I conducted research in the Newman Lab at MIT, working with a group investigating the application of reinforcement learning (RL) to robotic controls and comparing the RL solutions to human approaches. My work focused on training a model to stabilize an inverted pendulum using MATLAB and Simulink, approximating an ankle joint applying torque to balance a human. I also wrote a report at the end of the semester summarizing my findings.
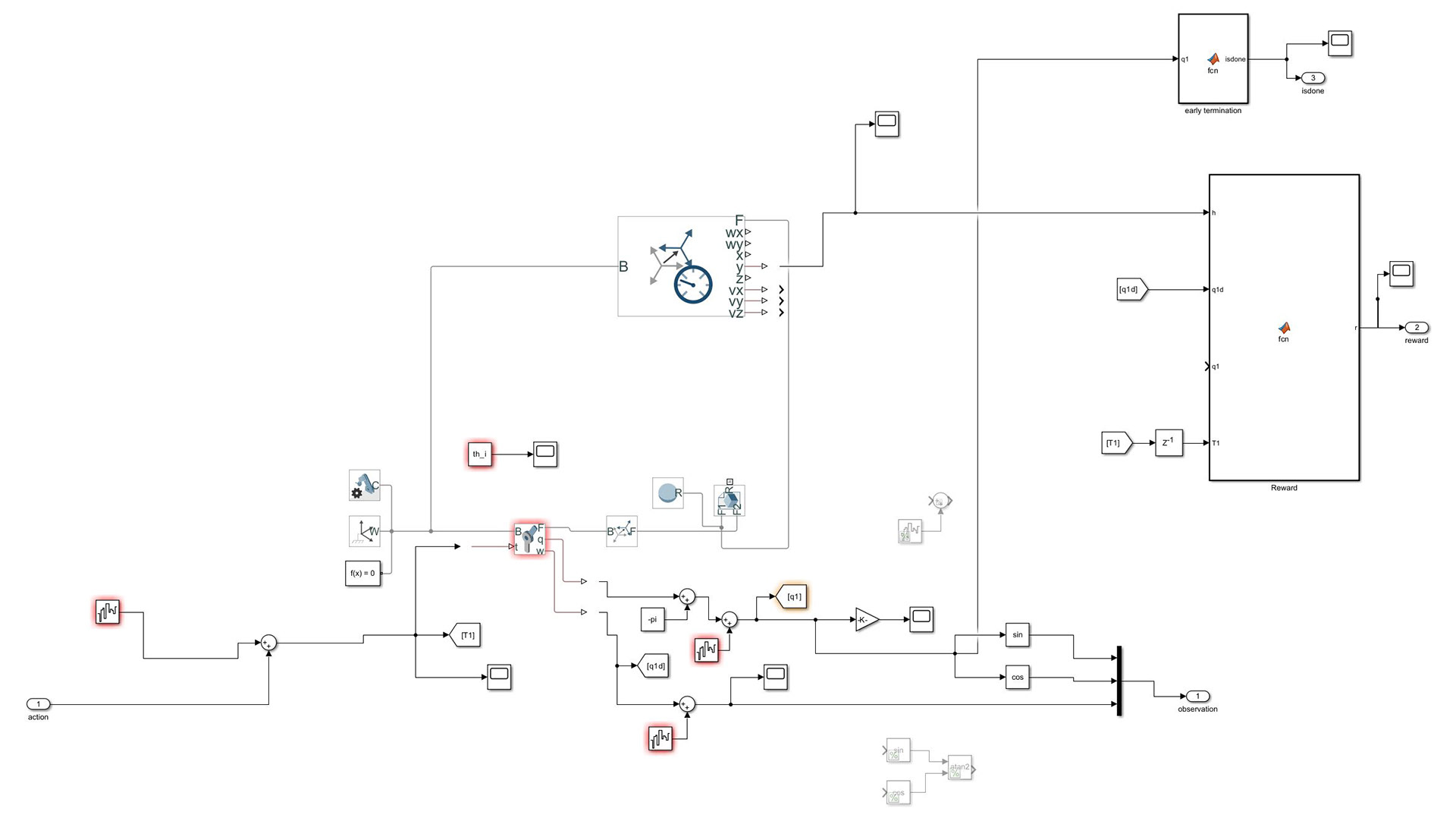
The model was trained using MATLAB and Simulink. The image on the left features the Simulink block diagram of the model environment.
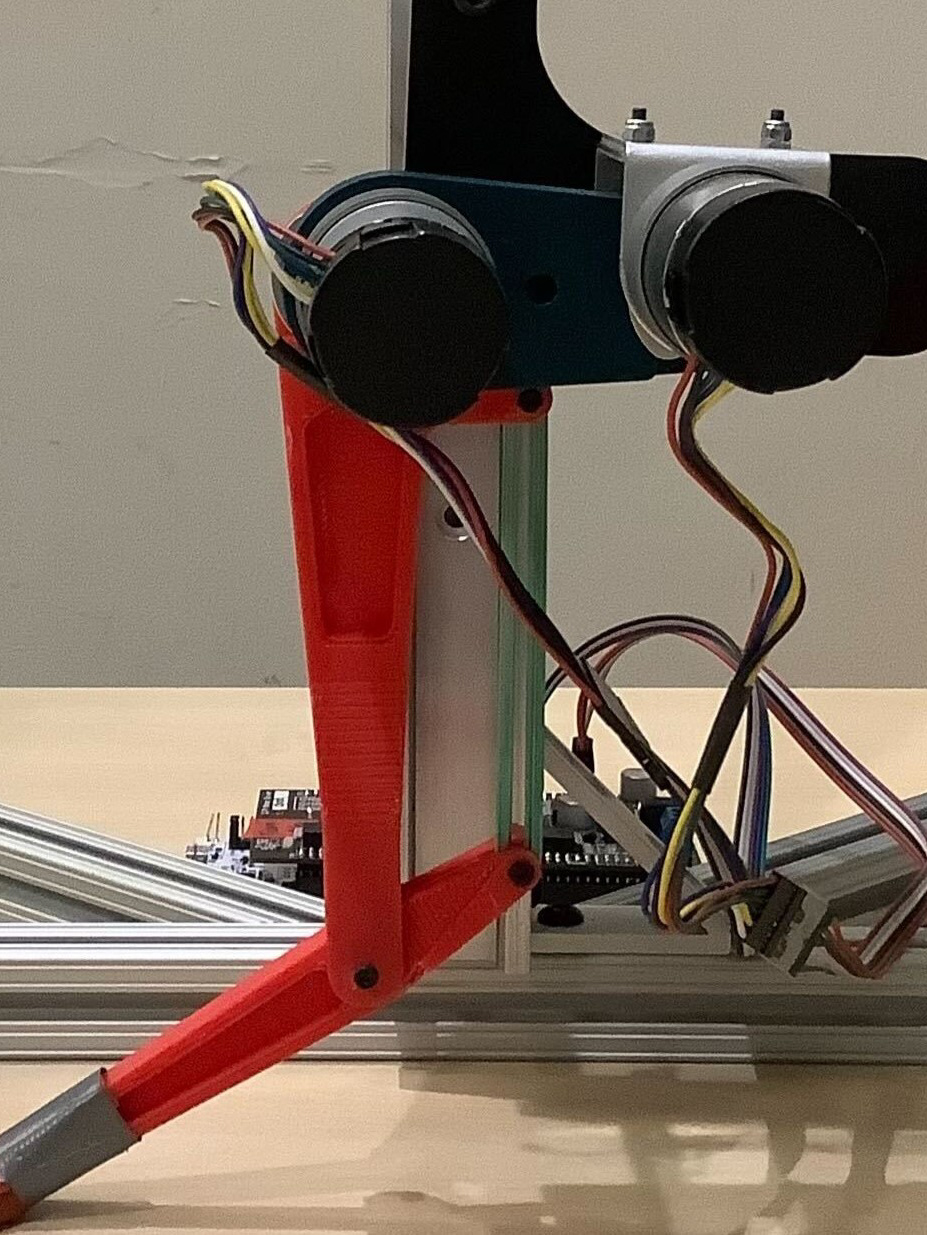
Initial experiments used different agent types (DDPG, TD3, and PPO) and reward functions. The video on the left shows the pendulum being stabilized by a DDPG agent.
Later experiments used a pendulum with a more human-like mass distribution and added noise. The model was able to stabilize the pendulum when band-limited white noise was added to the testing environment, but not when it was added to the training environment.